LidarView¶
LidarView is an open-source project. The application is capable of visualizing 3D LiDAR data in real time. Blickfeld has extended LidarView (hosted on github.com/Kitware/LidarView) in order to read point clouds from Cube LiDAR sensors.
Installation on Windows¶
To install LidarView (with Blickfeld LiDAR support) install the package provided by Blickfeld.
Usage¶
Connecting to the Blickfeld sensor¶
The sensor must be either connected directly to the PC or reachable within the network. Details can be found here: Network configuration
The following steps connect the Blickfeld sensor to LidarView:
Open Blickfeld sensor stream dialog box.

Click on Add a new scanner.
Enter the scanner IP address or hostname (for example cube-2020ABCDE).
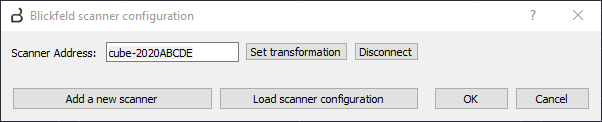
4. Set transformation [optional, required for 2 or more sensors]: A transformation file can be set for each sensor. This transformation describes the location of the sensor coordinate system with respect to the LidarView (i.e., the global) coordinate system. A sensor in LidarView is located at position (0,0,0) by default. Thus, for one sensor a transformation can be applied to shift the position. For two or more sensors, transformation files are required in order to take their spatial separation into account. The syntax of the 4x4 transformation matrix is a 3x3 rotation matrix and a translation vector and has to be provided as follows:
R11 R12 R13 Tx
R21 R22 R23 Ty
R31 R32 R33 Tz
0 0 0 1
An example file can be found here: lidarview-transformation-file.transforms.
It is possible to add more than one sensor by repeating the above steps 2 to 4.
Sensor configuration
To avoid typing the hostname or IP address and selecting a transformation file every time, these settings can be stored in a config file with the following syntax:
<hostname or IP> <file path to transformation file>
<hostname or IP> -
Each line corresponds to one sensor. The first entry is the hostname or the IP address. The second entry is the path to the transformation file or a dash (‘-‘) if there is no transformation file.
An example file can be found here: lidarview_config_file.cf.
In order to stop the streaming, press Disconnect.
Filter settings¶
To enable or change noise filtering on the point clouds received, the following steps are required:
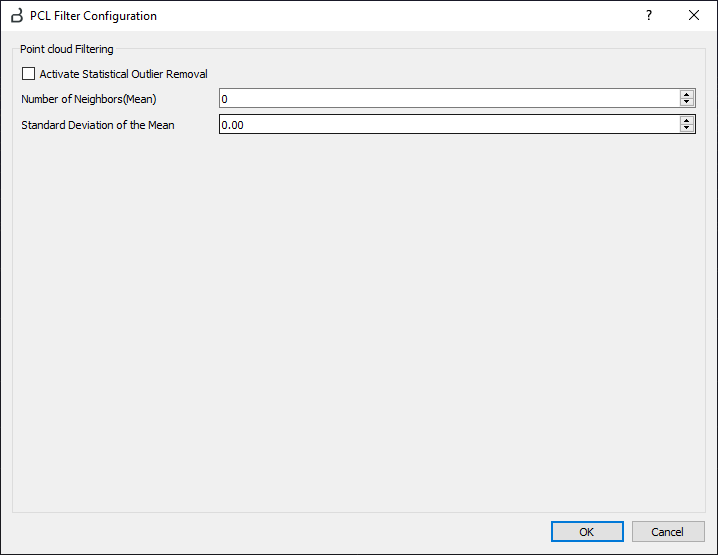
Open the ‘Blickfeld sensor management’ dialog box.

Choose Activate statistical outlier removal
Set Number of neighbors (mean) (e.g., 50)
Set Standard deviation of the mean (e.g., 2.0)
Details on the point cloud data filter algorithm applied can be found here.
Troubleshooting¶
Microsoft DLLs¶
In rare cases some libraries (DLLs) may be missing on Microsoft Windows. To identify this problem, start the tool from the Windows command shell. To solve this problem, the Microsoft Visual C++ Redistributable package (e.g., vc_redist.x64.exe) is required. It can be found on this Microsoft Support page. (Alternatively, search for ‘The latest supported Visual C++ downloads’ or ‘vc_redist.x64.exe’.)
Graphics adapter¶
Some users have reported LidarView problems when there are graphics adapter issues. Please try to fix or update drivers according to the graphics adapter vendor.
Other operating systems¶
LidarView can be used with Windows, Linux, and macOS. However, there are no installers available. Currently, Blickfeld only provides an installer for Windows. Please contact the Blickfeld support team for support for Linux or macOS.
On Linux it is also possible to run the Windows executable using Wine (www.winehq.org).
Further information¶
LidarView is based on ParaView (www.paraview.org / www.paraview.org/lidarview/), more precisely, it is a plug-in for ParaView. ParaView itself is a powerful tool for visualizing point clouds stored in files, but the software lacks a live mode. ParaView is a free, open-source software. The sources can be found here: hgithub.com/Kitware/ParaView.
License¶
LidarView is released under the Apache 2.0 license (see also http://www.apache.org/licenses/LICENSE-2.0).