Release v1.18
Warning
Only devices with firmware v1.17 or higher can be upgraded. Do not perform an upgrade if your device has an older firmware or if you are unsure which version is installed. Click here for information on how to find out the firmware version of your device.
The firmware release v1.18 introduces an on-device algorithm framework, an improved frontend, and various minor features and bugfixes.
On-Device Algorithms
Cube devices now offer on-device pre-processing algorithms, which can be enabled for any point cloud stream.
A client can set a list of algorithms in the subscribe request of the point cloud stream.
Algorithms can have configuration parameters, can mutate the frame, and can generate additional data output. The algorithms are executed in the order that is specified in the subscribe request.
A default set of algorithms can be set in the default point cloud subscription of the advanced configuration.
NOTE Algorithms take up computing time and processing power on the device. It is not recommended to request more than two streams in parallel.
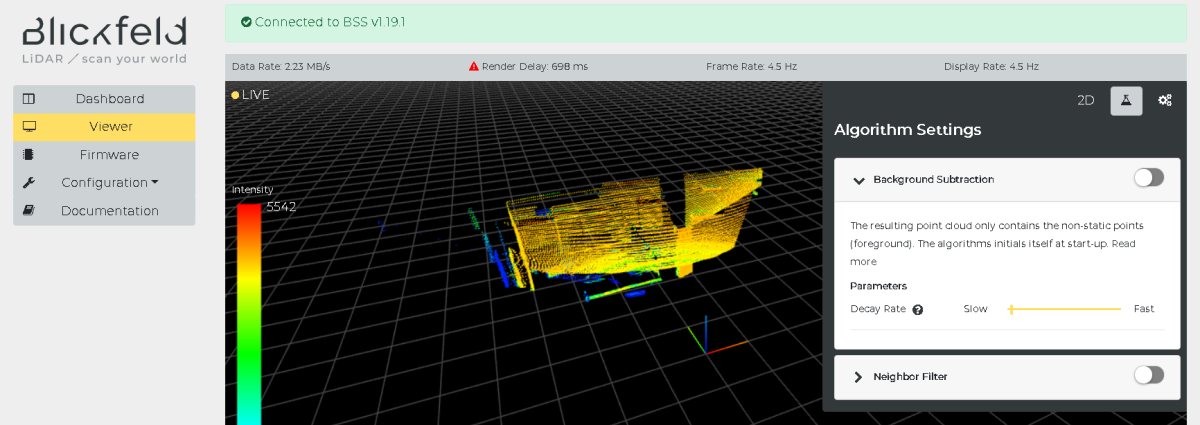
Background Subtraction
This algorithm feature is introduced for the first time with this release. It uses a configurable number of reference frames to estimate static points (background) in the scene. Once the number of reference frames are processed, it removes all static points from the point cloud frame. The resulting frame only contains the non-static points (foreground).
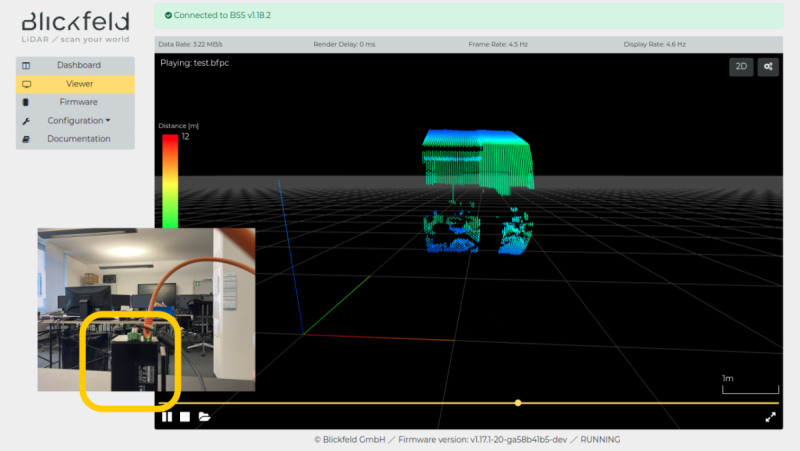
Image of an example scene:
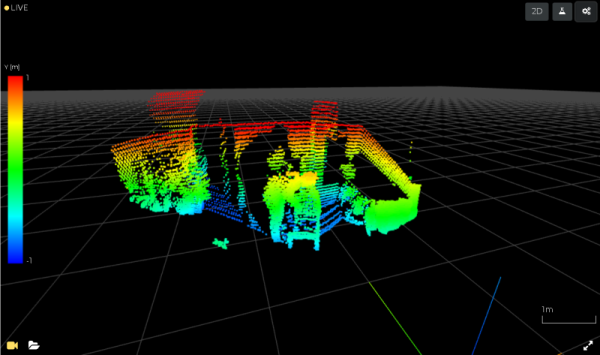
Result with activated background subtraction and neighbor filter:
Points that are in the foreground for a certain amount of time and do not move, are added to the background. Equally, if an object in the background is removed, the corresponding points will appear. The time after which objects are considered part of the background can be configured using the exponential_decay_rate parameter.
Neighbor Filter
This firmware release also adds a neighbor filter. The neighbor filter is a noise filter, which uses the knowledge about neighboring points in the scan pattern.
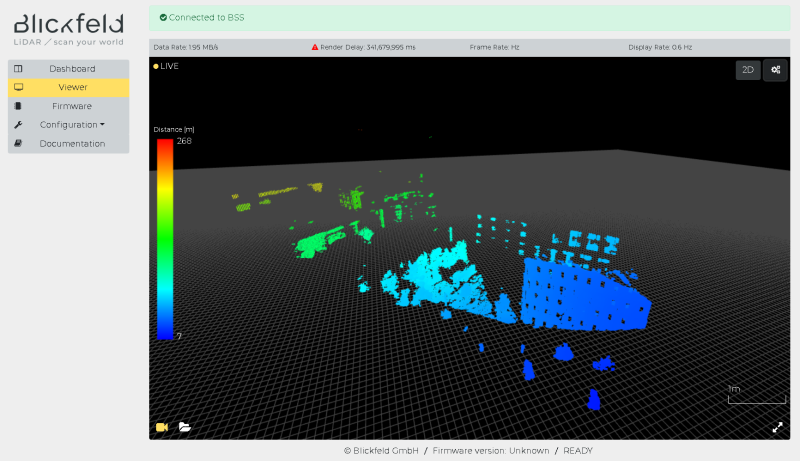
Here, an extreme example with an overdriven detector, which is causing a lot of noise artifacts, is shown:
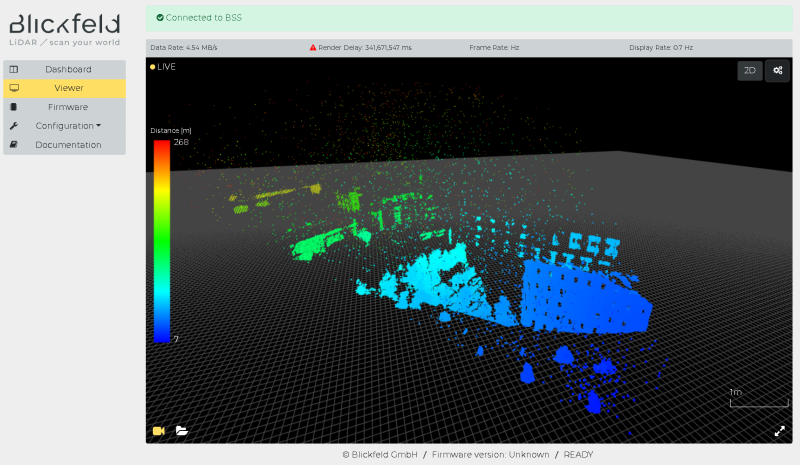
Result after applying the noise filter:
The algorithm iterates through all returns and removes all of those which have zero neighbors.
A return is considered a neighbor to the current return if it is:
adjacent to the left / to the right / above / below the current return in the scan pattern
close in distance with regard to the current return. The distance deviation is defined by the angle spacing of the scan pattern and the distance of the current return.
Static Transformation
The third pre-processing feature added with this release is the static point cloud transformation. The algorithm applies a static translation and rotation to the point cloud output. The transformation is defined by a translation vector and a rotation matrix, respectively.
WebGUI
Serial number
The serial number of the Cube devices is now shown in the footer of the WebGUI. For legacy devices, the old mainboard (MSB) serial number is shown. The serial number is also used for the title of WebGUI page.

Cube Range 1
The WebGUI now adapts to the configured product. For the Cube Range 1, the correct image is shown.
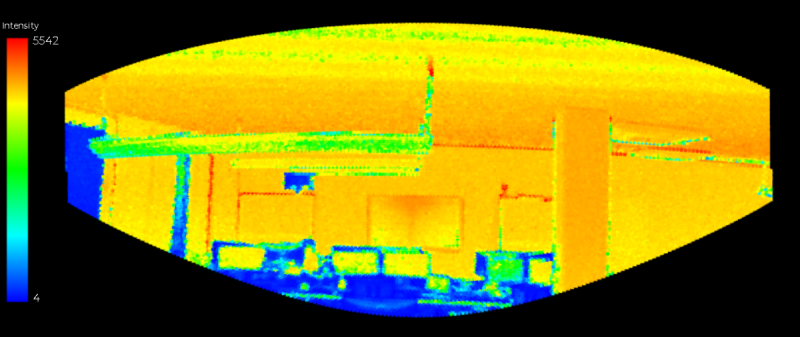
Default color map
The default color map is set to “Rainbow” now. This improves the visualization, in particular for intensity coloring.
Grouped client connections
The client connections in the dashboard are now grouped by the hostnames of the clients.
Stability
WebGUI
The robustness of the WebGUI, especially during connection losses and scan pattern configurations, has been improved
Long-term operation
The excessive memory usage of the http proxy on the device has been fixed. This occurred on devices that operated for a long time. Devices did not fail but the configuration API became slower after weeks of operation.
This only happened if a WebGUI was permanently connected to the device