Release v1.19
Warning
Only devices with firmware v1.17 or higher can be upgraded. Do not perform an upgrade if your device has an older firmware or if you are unsure which version is installed. Click here for information on how to find out the firmware version of your device.
The firmware v1.19 introduces IMU support, PTPv2 time synchronization, and a static transformation tool in the WebGUI.
IMU
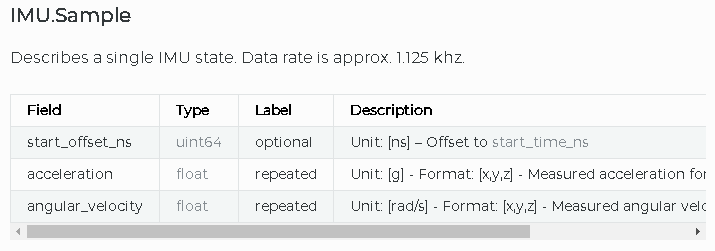
Cube device has an integrated inertial measurement unit (IMU), which includes a 3-axis gyroscope and a 3-axis accelerometer. The IMU can be used for instance for mapping applications or static auto-leveling.
The data can be retrieved via a separate stream at a constant rate of 1.125 kHz. The data is combined with a timestamp, which is fully synchronized to the LiDAR point timestamps included in the point cloud stream.
In the status message of the device, a time-averaged value of the acceleration is provided. This may be used for simple set-ups with statically mounted devices.
PTPv2 Time Synchronization
With this release, the time synchronization configuration was moved from an undocumented REST endpoint to the BSL API. With this change, PTPv2 time synchronization was enabled, which is supported natively by Blickfeld hardware. PTPv2 can achieve a higher accuracy compared to NTP in local networks.
>>> scanner.get_status().time_synchronization
state: SYNCED
offset_from_master: 0.473351
ntp {
frequency_offset: 1.975
}
The API offers a status interface, which can be used to monitor the time synchronization. Using the configuration interface, the time synchronization can be re-configured within seconds and without reboot.
>>> scanner.set_time_synchronization(ptp=True)
>>> scanner.get_status().time_synchronization
state: SYNCED
offset_from_master: 6.9566e-05
ptp {
state: "slv"
clock_id: "049162fffebfa582(unknown)/1"
one_way_delay: 5.9186e-05
slave_to_master: 8.9946e-05
master_to_slave: 7.5854e-05
last_packet_received: "-3026.350748047"
}
WebGUI
Static transformation
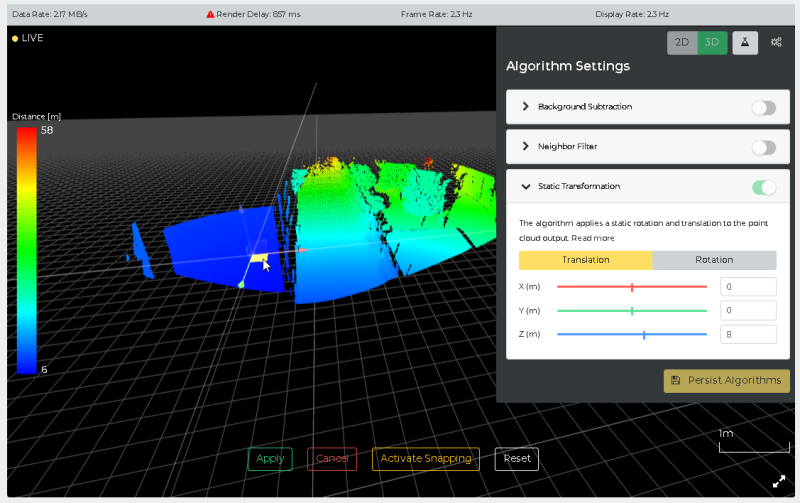
The WebGUI now features an easy-to-use configuration of the static transformation algorithm interface in the Viewer tab. The static transformation algorithm has been introduced with firmware v1.18.
The user can translate and rotate the point cloud interactively. Measured parameters can also be entered directly in the UI.
The result of the static transformation can be applied to the current point cloud visualization in the WebGUI Viewer, but can also be persisted on the device. If the configuration is persisted, all new point cloud streams will automatically launch with the transformation. Existing active streams are not updated.
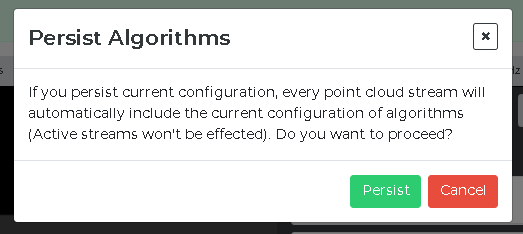
The persist feature also works for other algorithms such as the Background Subtraction.
Constant point sizes
All data points displayed in the WebGUI Viewer now have the same size and are no longer scaled according to distance.